

How we measure sea ice
Sea ice is a sensitive indicator of climate change for the polar regions and beyond, so monitoring sea ice is important.
Sea ice occurs in both the Arctic and Antarctic where conditions are cold enough for the ocean to freeze. Sea ice is an important component of the climate system because it forms a mechanical barrier between the ocean and the atmosphere inhibiting the exchange of heat, momentum, freshwater, aerosols and gases. Further information on the Sea ice in the climate system and the Sea ice overview is available.
Like many other parts of the Earth's climate, monitoring of sea ice makes use of numerous observational datasets using both in-situ and remote sensing methods. As well as measuring the areal extent of the sea ice cover, knowledge of the ice thickness (or volume/mass) and its movement are important for the purposes of climate monitoring in order to get a complete picture of the sea ice. Over the last few decades new observational systems, in particular satellite platforms, have considerably increased the number of sea ice observations available to researchers.
Sea ice concentration
Measurements of sea ice concentration (the local fraction of ice covered ocean) are inferred from satellite observations of thermal microwave radiation emitted from the Earth's surface. Routine observations, with a full coverage every few days (except for a missing 'hole' north of 87 degrees where satellites are unable to take measurements because of the nature of their orbits), have been undertaken since 1979. Microwave emissions can pass through cloud, but are slightly affected by snow and rain. An empirical relationship between microwave brightness at different wavelengths is used to distinguish sea ice from open water. The sea ice fraction is calibrated using observations of an open ocean location and one which is thought to be 100% ice covered. Many such empirical schemes to retrieve sea ice concentration are in common usage. All employ different assumptions and corrections to account for differing surface conditions and the effects of snow and rain. A cut-off in ice concentration of 15% is often used to reduce the effect of weather contamination on ice concentration retrievals. The uncertainties in the retrievals are largest in summer because melt ponds are difficult to distinguish from open water and the technique cannot see thin ice (which does not mask the microwave emission of the underlying ocean) or ice concentrations greater than 90% (owing to spatial and temporal variability in the overlying snow characteristics). Overall an uncertainty of one million square kilometres (20% error in summer and 7% error in winter) might be expected for a measurement of total Arctic ice area.
Figure 1 shows average winter and summer Arctic sea ice extent - the total area of ocean containing sea ice with concentration of at least 15% - over the period 1981-2010. Data from Met Office Hadley Centre HadISST dataset which combined numerous satellite observations from multiple platforms.
Arctic sea ice extent
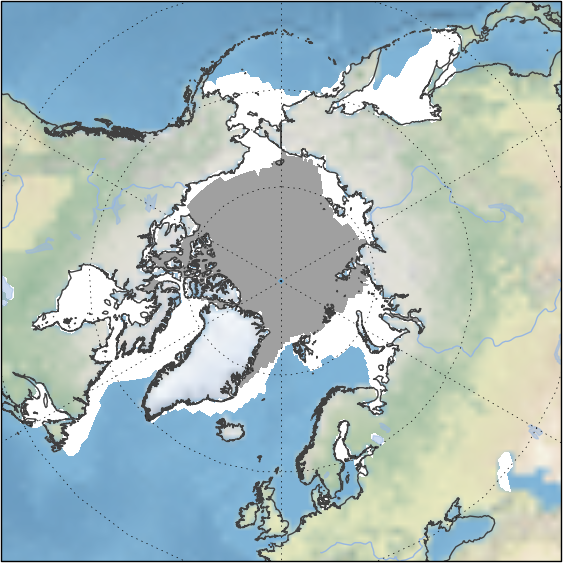
Figure 1:Average summer minimum (grey) and winter maximum (white) Arctic sea ice extent derived from satellite sea ice concentration measurements taken over the period 1981-2010.
Sea ice concentration may also be provided through ice charts. Ice charts are interpretations of data from a number of sources, such as on-shore observations, satellite imagery and sometimes observations from aircraft. They were originally hand-drawn but since the late 1990s are now more commonly produced using computers. Figure 2 shows data from a digital sea ice chart of the Greenland area for the end of August 2015.
Digital ice chart for Greenland area
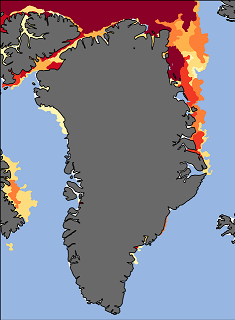
Figure 2:An example of a digital ice chart of the Greenland area for the end of August 2015. The yellow and red shading depict sea ice concentration from 5% (light yellow) up to 95% (red) in intervals of 5%. Open water is shown in blue.
Sea ice thickness
Sea ice thickness combined with sea ice concentration provides an estimate of ice volume. An imbalance in the regional energy budget (i.e., a warming of the ocean or atmosphere) results in melting of the ice and a consequent change in sea ice volume. Although sea ice floats upon the surface of the ocean, the mass of the floes causes the sea surface to be forced downwards immediately underneath the ice. The depth of sea ice below the surface of the surrounding ocean is known as the 'draft' whilst the depth of ice above the waterline is known as the 'freeboard'. On average approximately 1/9th of the sea ice is above the waterline and 8/9ths below although the exact amount depends on the buoyancy of the ocean below. The sea ice thickness is the sum of the freeboard and the draft and may be measured by a number of airborne, submersible and satellite platforms as described below:
a. Submarines
The longest record of Arctic sea ice is from navy submarines which use upward-looking sonar to map the overlying ice draft (the depth of ice below the ocean surface). The ice draft may be processed to derive sea ice thickness. Declassified submarine sonar data has been available since 1958 and more recently automated submersibles have been used during scientific field campaigns.
b. Static upward looking sonar
Instruments moored to the sea floor can provide a near continuous measurement of sea ice draft at specific locations. The measurements are stored until the mooring is periodically recovered.
c. Satellite altimetry
A laser or radar pulse directed downward from a satellite (or aircraft) can measure the distance between the satellite and the Earth's surface (see Figure 3). Using this method the difference between the ocean surface (in the leads between sea ice floes) and the sea ice surface - i.e., the freeboard - can be measured. One difficulty with this method is that sea ice is often covered with snow, the weight of which depresses the underlying ice surface downwards. The depth of this snow cover is unknown by the satellites because laser altimeters only measure to the snow surface. Radar altimeters however can see through the snow to the ice surface. The requirement to correct both measurements for the unknown snow depth introduces uncertainty into the measurement of sea ice freeboard. As freeboard is approximately 1/9th of the sea ice thickness, such uncertainty can lead to larger uncertainties in the inferred thickness values. Altimeters are also limited to measurements directly under the satellite, and so do not provide complete global coverage.
The main limitation of laser altimetry is that it can only make measurements under cloud-free conditions, and the Arctic is 90% cloud covered during summer. The main limitation of radar altimetry (which can see through the clouds) is that the radar characteristics of sea ice change significantly once the surface becomes wet with melting. Thus both types of altimeter can only make measurements of ice freeboard during the winter when there is no surface melting and lower cloud coverage. Figure 4 shows average sea ice thickness during winter 2013 inferred from radar altimeter measurements taken by ESA's CryoSat-2 satellite.
Pictorial representation of ESA's CryoSat-2 satellite measuring sea ice freeboard.
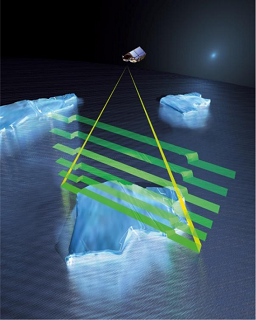
Figure 3:A pictorial representation of ESA's CryoSat-2 satellite measuring sea ice freeboard. The radar altimeter continually transmits pulses towards the surface. The time delay between pulse transmission and receipt of the reflection provides the distance to the surface. (Image courtesy ESA)
Arctic sea ice average thickness for winter 2013
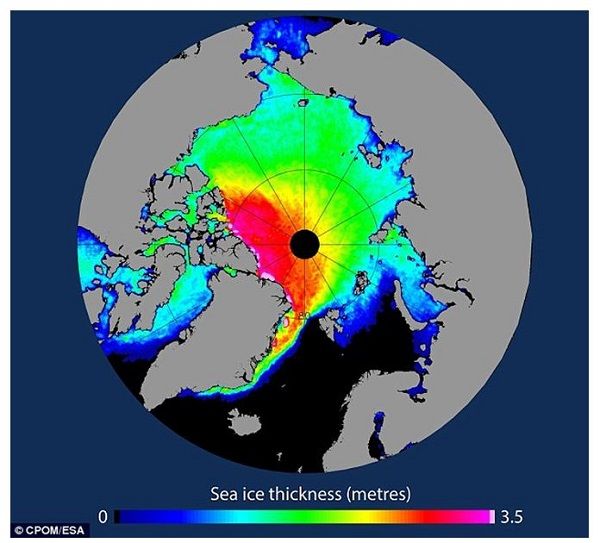
Figure 4:Arctic sea ice average thickness for winter 2013 measured by ESA's CryoSat-2 satellite. (Image courtesy CPOM/ESA)
d. Aircraft
Measurements from aircraft-borne altimeters have a much higher spatial resolution than those from satellites, but can provide only limited coverage of the ice pack. Another instrument available to aircraft uses electromagnetic inductance. By generating, and detecting electrical currents, through inductance, in the water under sea ice, the thickness of the sea ice can be determined provided the distance to the ice surface (laser altimeter) is also known. The focus of airborne measurements has been in annually flying repeat paths over the sea ice, providing information on the local variability of the ice thickness (see Figure 5).
A high resolution profile of ice thickness generated from an airborne inductance probe.
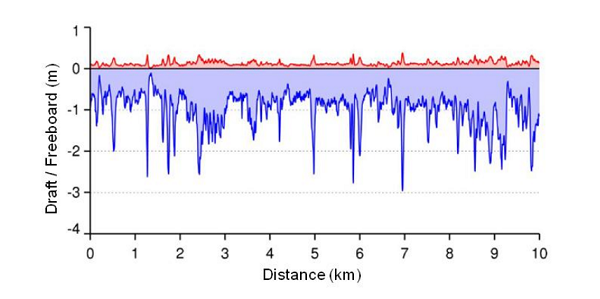
Figure 5:A high resolution profile of ice thickness generated from an airborne inductance probe. The snow surface is measured by a laser altimeter and the bottom of the ice marked by the detection of magnetically induced electric currents in the water. The freeboard (in red) is the thickness of ice above the waterline and the draft (in blue) is the thickness below. (Image courtesy: Stefan Hendricks, Alfred Wegener Institute)
Sea ice age
The age of sea ice is a proxy for ice thickness. Knowledge of sea ice age therefore can tell us whether an Arctic mean thinning of the ice pack is a consequence of a loss of the thicker perennial ice. The longer sea ice floes remain in the Arctic, the more they are processed by ridging when winds and currents push the ice together, making the ice thicker and the surface rougher. Seasonal ice meanwhile is thinner and smoother than perennial ice and these differences in surface roughness can be measured by satellite radar. Multi-year ice also has a lower salt content (or 'salinity') than first year ice which causes it to have a lower conductivity which can be detected using passive microwave or SAR (synthetic aperture radar) instruments.
Sea ice age and condition.

Figure 6: Sea ice age and condition as measured by a satellite-borne radar. (Image courtesy: S. V. Nghiem, Jet Propulsion Laboratory)
Another method for determining the ice age is to track buoys which drift around the Arctic embedded in the sea ice. The trajectory of the buoys and the length of time that they remain in the Arctic (which can be many years) is an indicator of the age of the ice floe in which they are embedded.
Sea ice mass balance
The ice mass balance sums up all the effects that weather and ocean temperature have on the sea ice state. If there is net warming over time, then there will be thinning of the ice and, conversely, net cooling will lead to thickening of the ice. Coupled with ice temperature measurements, mass balance measurements provide valuable information on the heat exchange among the air, ice and ocean. Observations of ice mass balance enable researchers to explore what changes in ice thickness are taking place and how these changes occur, thereby improving the understanding of important role of the Arctic sea ice cover in the global climate.
Sea ice mass balance measurements are made by buoys embedded in multi-year sea ice floes. The buoys carry instruments which include temperature sensors through the ice, an upward-looking sensor suspended beneath the ice and a sensor above the ice looking downwards. These sensors tell us how much of the ice is being melted by the atmosphere above and how much from the ocean below. The data gathered is transmitted, via satellite, back to the data archiving centre. Mass balance buoys are expensive to deploy and the severe environment of the Arctic, as well as curious polar bears, can result in premature sensor failure.
Sea ice drift
Sea ice is always in motion, as a consequence of winds, ocean currents and tides. Ice drift maps can be constructed from sequential satellite images, either the passive microwave instruments (used to measure ice concentration), the radar (used to measure ice age) or high resolution synthetic aperture radar (SAR). All these instruments can see through cloud and so can obtain repeated images of the sea ice every 1 to 3 days. Sea ice drift is inferred using a technique to identify and track small scale contrast features in the ice pack. Such features may be individual floes or regions of different surface roughness. This feature tracking technique provides a snapshot of the ice drift between images. Although the technique is useful in the main ice pack it is not possible to use it at the ice edge where ice floes change position more rapidly than can be followed by the imagery.
Another method of measuring sea ice drift uses the position of buoys fixed within the ice that drift with the floes. These buoys are fitted with global positioning system (GPS) instruments which transmit the position of the buoy every few minutes to the data archive centre. Thus, the buoy-derived drift can be of higher frequency than the drift derived using feature tracking, providing analysis of the response of the sea ice to tides and storms.
Sea ice camps and frozen ships
Year-round, detailed, and comprehensive measurements, extending from the atmosphere through the sea-ice and into the ocean of the central Arctic Basin are needed to improve our understanding and modelling of Arctic climate and weather, and enhance Arctic sea-ice predictive capabilities. Scientific icebreaker ships can undertake focused studies of sea ice, oceanographic and atmospheric processes in the Arctic. These ship cruises can make measurements that are not possible with aircraft or satellites, but only provide a snap-shot in time and location.
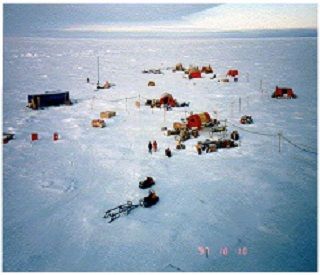
The strong seasonality of the Arctic means that, to comprehensively characterise sea ice, and its interactions with the atmosphere, continuous observations over the course of a year are required. These observations are undertaken by 'ice camps' based upon the sea ice that drift with the ice pack throughout the year. Ice camps are usually created by freezing an icebreaker into the sea ice. The ship then becomes the power supply and home of the scientists who undertake the detailed studies of the local climate system. The first such drifting laboratory was named Surface Heat Budget of the Arctic (SHEBA) and lasted from September 1997 to October 1998. A few similar drifting ship laboratories have been established since but these have tended to be much smaller scale. The next drifting laboratory on the same scale as SHEBA will be the Multidisciplinary drifting Observatory for the study of Arctic Climate (MOSAiC) which will take place in 2020.
Ice camps are increasingly used to employ new, emergent technologies such as Unmanned Aerial Vehicles (UAVs) and Autonomous Underwater Vehicles (AUVs). Unmanned Aerial Vehicles can be programmed to extend observations of the ice surface across ice leads and melt-ponds, for distances of a few 10s of kilometres. They are often manually controlled for landing and takeoff. Autonomous Underwater Vehicles (AUVs) are robots that may be programmed to measure the ocean properties under sea ice or the base of the sea ice itself. They can be launched from ships or through a hole cut in the sea ice.



